(Tri-Circle Bot)
|
|


Portfolio Guide Reflection
1. State the assignment (problem/project) in your own words.
The assignment was to create a robot that would travel and stop in three different placed circles for a certain amount of time. Then, make it back to it's starting point.
2. What are your input factors? (What do you need to know or do before you can begin?) Include the research you did.
The input factors we needed to know was how long we had to stay in each circle and what order we had to go in. Once we knew that, we could easy calculate the distance between each circle and the degree of rotations it will take. From there all we had to do was find how long it would take to steer the robot into the next circle.
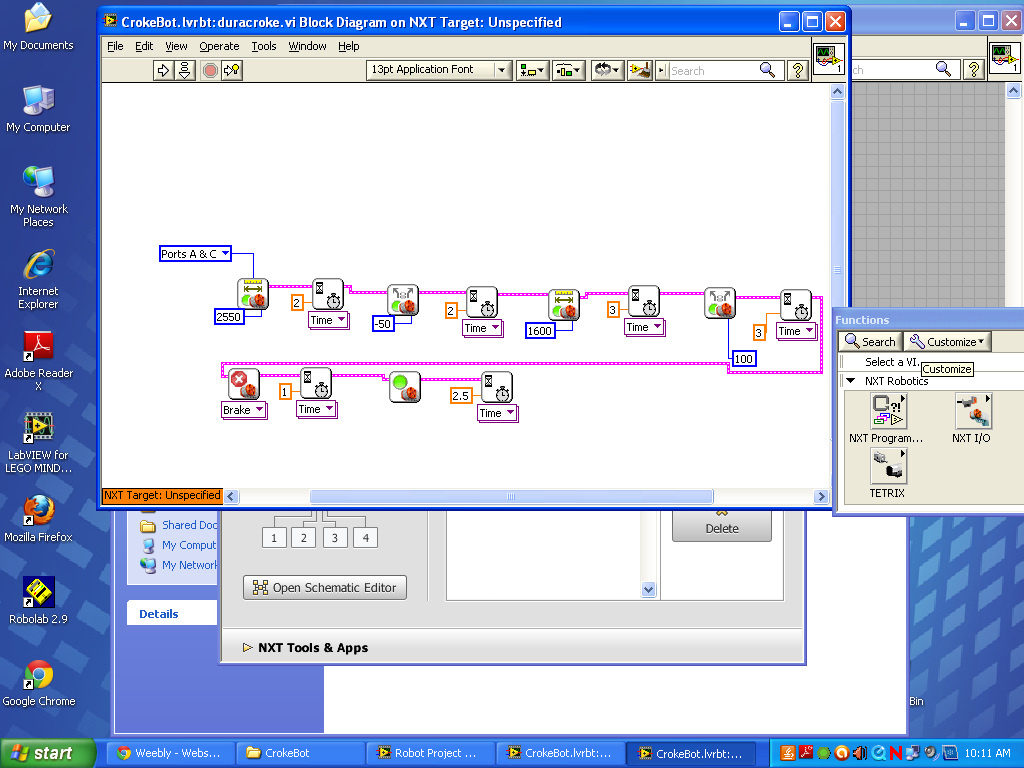
3. Describe the process in detail. Explain the steps you followed in order to complete the project.
First, all we did was create a simple robot with two motors that can move. The hard part was the programming. It was basically trial and error. First we measured the distance between each circle and transferred that with how many rotations it would take. Once we found that, we found how long the robot would have to steer (turn) in order to be facing the next circle. Doing that back and forth for all three circles, we finally completed the projects.
4. Describe the final output / product in detail: (what are we looking at?
The final output was just a little robot with wheels that was easy to turn and move. Nothing extraordinary just a simple bot.
5. Describe feedback you received during the project (suggestions, comments, etc). From peers, instructor etc. How did you use this feedback to correct issues with your project?
The feedback we received was that we needed keep placing the robot in the same spot. This helped us by keeping our information more accurate and everything running smoothly.
6. What did you learn during the assignment such as tools, skills, design concepts, software, hardware, etc?
During this assignment we learned how to use the steering and distance app in the programming. Other than the programming (which was the hardest and where we learned everything) the other stuff was just repeats.
7. If you were to do the project again, what would you do differently and why? Provide reasons and examples.
If we were to do this again, I would make the robot more accurate by measuring the circumference of the wheels. That way we could land exactly in any location we wanted mathematically. Not only would it land perfectly but it would be so much easier then using the method of trial and error. although that would take for ever i would still do it
